Introduction
Last week at the priory, each group was required to maneuver through the navigation course with only a map and a compass. On May 5, 2014, each group was required to go through the entire navigation course, but this time we were actually given a GPS unit (reference map in Figure One).
 |
| Figure One - The is the general location of the where the priory is. Interstate 94 and Hwy 53 are shown for reference. |
Before going to the priory grounds, we were required to load one of our maps that was made a few weeks ago in a Trimble Juno with the data of each of the points included in our map (Figure Two). The process of finding the each checkpoint is made to be more efficient because the GPS tracks exactly where we step. One added aspect on this exercise is that everyone was armed with a paintball gun! If any member of your group was shot with a paintball, your whole group had to remain stationary for about one minute, as the goal of this exercise is to be the first one through the whole navigation course. This made things a little more interesting.
 |
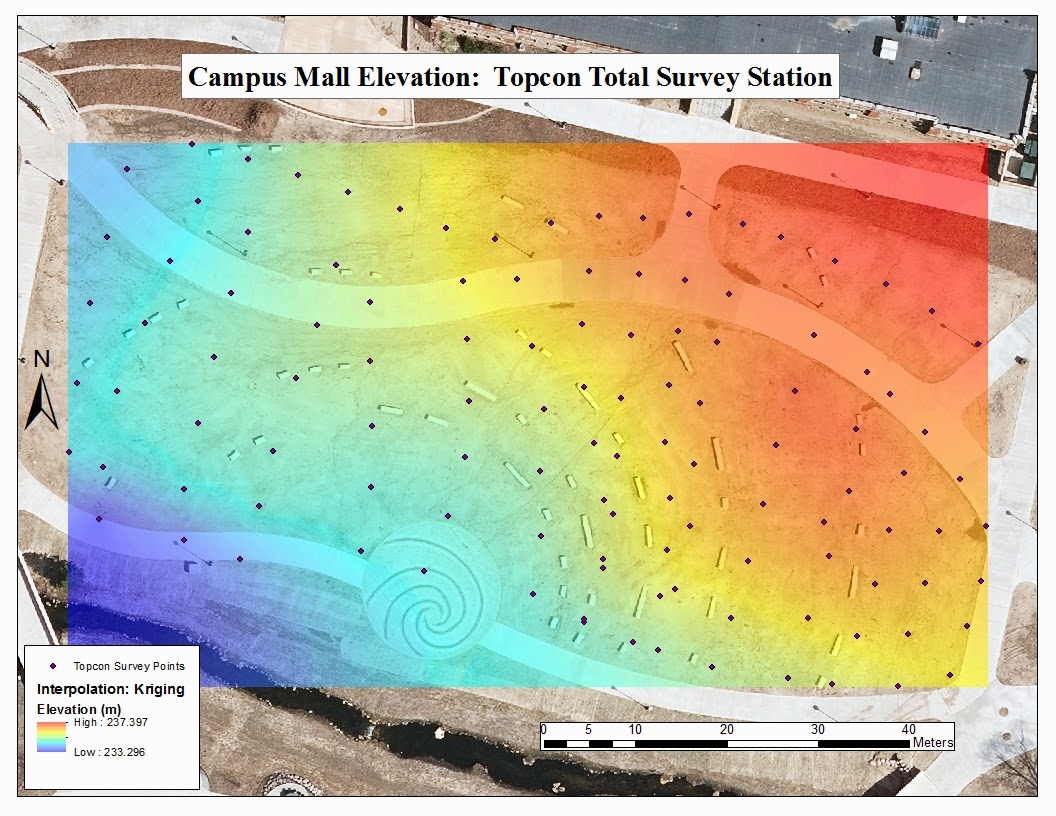
| Figure Two - This is the map that our group loaded into our Trimble Juno GPS unit. There is a colored and transparent DEM on top of imagery that was taken with LiDAR data collection on May 13, 2013. The yellow points are the navigation points and the red line was the path that our group decided to take. Contours are labeled in blue. The areas in pink are "no shooting" zones due to the fact that they are either close to a road or children areas. |
Methods
Every group needed to get through the entire navigation course at the priory, but every group started their navigation at a different checkpoint. This was done to try to ensure that groups would not run into each other too much. Our group had to start at the northern most point in the navigation course (marked with a yellow star in Figure Two). This was somewhat of a disadvantage for our group because I felt like most of the other groups had starting points much closer to where the initial class meeting spot was. Our group was shot at before we even made it to our starting point. We used the Trimble GPS to tell us which direction to go for each of the checkpoints. Our path was being tracked, so it was easy to see if we were going the right direction or not. While getting from one point to the next, we always had to be aware of our surroundings because you never know who is hiding behind a nearby tree with a paintball gun. We had to keep our face masks on the whole time just in case someone would sneak up on you. We were also not allowed to shoot anyone if it looked like they were not wearing a face mask.
 |
| Figure Three - This is what the Trimble Juno GPS units look like. They have a large touch screen and a built in stylus to assist with operation. |
Results
Our track log was on the whole time and turned out to be quite accurate to what our path actually was. We turned it on when we were still at the class meeting spot, so our actual starting location of the track log was near the southwest end of the mapping area. Our group did stick with the path that we had earlier agreed upon, but the track log shows deviations from the straight line segmented path (Figure Four).
 |
| Figure Four - This map shows our planned path in yellow, which was decided before going out into the field based on elevation and distance factors. The blue dots represent our track log throughout the navigation course. |
Because our team had such great team work, we only got shot once by another group even though we were in quite a few different battles. We also hit at least two teams along the way.
Discussion
A few of the deviations in our track log were intentionally done to avoid getting shot by other groups. This was especially true for the points that are furthest west in the mapping area. When attempting to get from our third to fourth point, we heard two other groups firing at each other, so we decided to move further west until we heard their battle die down. This is why there is a bit of a cluster of points on our furthest west points in the track log. Other deviations were from elevation factors or had to do with getting through the path of least resistance. With the varying topography, sometimes it is just easier to go down a hill in a way that isn't a straight line from your last point. Also, since this area was so heavily forested, the abundance of standing trees and trees that were knocked over impeded on our original path.
Conclusions
This was a really great exercise for our Geospatial Field Methods class. We had the luxury of using a GPS to get from one point to another, but had the added "stress" factor that people are wanting to shoot at you. This forced groups to think on their toes, be aware of their surroundings, and try to be efficient and get through the course as quickly as possible. Every group was able to navigate through the course with little paint damage to their team. This proved that each student was able to do field work under pressure, which is helping to prepare us for a professional situation. Not to say that you will be shot at with a paintball gun in a job setting, but there will always be some pressure to do a job efficiently and accurately.